
浅析冲压自动化线生产节拍优化
文/魏守利·重汽(济南)轻卡有限公司
中国重汽HOWO 轻卡2020 年产销量屡创新高,各生产线承受了巨大的生产压力。冲压自动化生产线没有成为瓶颈工序,要归功于生产节拍优化。生产节拍是衡量生产线产能的重要指标,节拍优化后的生产效率大幅提高,在相同的时间内可以生产更多的冲压件,从而降低冲压件的生产成本。
重汽(济南)轻卡有限公司引进了一条冲压自动化生产线,主要生产重汽HOWO 轻卡驾驶室的外观覆盖件。引进这条生产线的时候采用了拆分单元的模式进行,分别采购了济南二机床集团有限公司的压力机、ABB 公司的冲压搬运机器人及清洗涂油机等设备。以ABB 公司的整线集成方案协同各厂家集成整线,充分利用各厂家在各自领域内的强项,揉合他们的先进技术建立了一条冲压自动化生产线。
投产后碰到的难题
生产线的投产初期,我们在生产速度优化方面碰到很多困难,具体有:⑴设备与设备之间的控制逻辑存在很多不一致的地方,直接的结果就是导致生产线生产节拍慢;⑵不同厂家设备之间的联锁信号缺乏正确性,提高生产速度的同时,也增加了设备发生相互碰撞的概率,难以找到生产效率与设备、模具安全之间的平衡点;⑶各个设备之间只是用相互之间的联锁信号进行优化,没有整线控制生产速度的模式与专用控制器;⑷没有机器人的同步系统,硬件上增加了优化的难度,并且在一定范围内约束了生产节拍。
影响生产速度的要素
冲压线的设备管理员、操作人员和机修人员,不断地为提高生产效率而进行生产线的节拍优化作业。在现场中应用持续改善的思想来降低零件生产的CT值,总结出一套优化生产线生产节拍的有效方法。冲压机器人自动生产线中,有两个与生产速度相关的要素,即各设备的动作速度和动作协调性。
动作速度
在实践中我们发现,当各设备以最大的速度运行,并且各台压力机同步冲压、各台机器人同步搬运的时候,生产线生产速度最快。对于各设备速度来说,拆垛上料单元和压力机的速度通常是不会变化的;而机器人运动速度调整的柔性非常大,成为影响生产线速度的主要因素。
机器人的运动速度与机器人的动作特征是密切关联的,实际的运动速度除了与设定的数值大小有关系外,还与运动过程中的姿势变化和运动方式有关系。机器人动作的特点如下:⑴运动过程中姿势变化越少运动速度越快。在保证安全的条件下,尽可能减少机器人运动过程中姿势的变化。⑵机器人运动速度的特征是两个点之间的运动:MOVJ 弧线运动速度> MOVL 直线运动速度。当选择MOVEJ 命令,机器人会自动计算运动最快的弧线轨迹。
熟悉了机器人动作的特点后,我们就可以将各个零件的机器人轨迹标准化。新建零件时,复制以前相似的零件轨迹,做简单的改动后就能得到理想的轨迹。完成这一步后,就可以将单台机器人的搬运速度调到最快,满足要素中的第一个条件。
动作协调性
如何将各台设备以其最大运动速度揉合在一起,组成一条生产速度快的生产线?简而言之就是如何调节设备之间动作的协调性呢?
冲压生产线理想的优化状态应该是各设备以其最大的速度运行,以最短时间完成单个动作循环,各设备的每个动作循环中只有一个等待点;在安全的条件下,前一台设备以最短时间启动下一台设备。站在整线的角度来看,机器人能够同步搬运,压力机能够同步冲压。机器人上完料开始后退时,压力机滑块开始启动,并且模具差点与机器人相撞;滑块开始上升时,机器人立即进去抓料,并且差点与模具相撞。各设备以自身最大的速度运行,相互之间的启动参数设置到最大值,并且能够协调一致运动。
生产节拍的优化
使用机器人的冲压自动线,机器人的动作与其前后压力机相关而将整线连成一个互相牵连的整体。我们可将整线分为N 个周期性运动的单元进行分析,其各自最佳状态下运动周期Tmin 的最大值决定了整线的速度SPM。
⑴四工序冲压线可拆分为五个单元(图1):拆垛上料单元、四个压力机单元(压力机与压力机后面的机器人)。⑵各单元在最佳状态下无等待的动作循环周期Tmin 均可独自测量、优化。 拆垛上料单元,机器人从拆垛小车上抓料放料,板料经清洗涂油、对中,机器人从对中台上抓起板料送进模具,机器人再抓下一张料。压力机单元,滑块下行至下死点完成冲压、从下死点升起,机器人进模、抓料、出模,送料进模、放料、出模,滑块再次冲压。
各单元的优化内容与措施
⑴ 拆垛单元。板料在拆垛小车上以中心定位,所有料架在拆垛小车上以中心定位,这样所有板料的拆垛程序统一为一个。机器人各步动作速度在程序里合理调整确定。经测量,拆垛单元的动作循环时间比压力机单元的循环时间要快,拆垛单元不是整线的瓶颈单元。
⑵压力机单元。四个压力机单元的动作时间是决定整线SPM 的基本因素。压力机单元的动作时间是指压力机冲压、机器人下料、机器人上料、机器人回到下料等待点整个过程的时间。压力机单元时间T= t1(压力机冲压)+t2(机器人下料)+t3(机器人上料)+t4(机器人回到下料等待点)。

图1 冲压生产线布局
调整单元设备时间
单元是生产线最重要的元素,首先我们将单元内的设备动作协调,使单元的动作时间最少,才能进一步使生产线的单元动作协调,达到生产线优化的效果。如何将单元的设备动作时间调整到最少呢?主要有以下三个方法:
⑴下料机器人提前启动上料机器人。没有优化前,下料机器人到达退出下料点OU 之后,才允许前面的机器人上料。优化之后下料机器人在到达OU 之前一段距离,就允许前面的机器人上料(图2)。这段提前的距离就是提前上料许可距离LA,界面参数为“Load Authorization Dev1 Phase1”。这个参数只有在自动模式下才能设定,并且在机器人速度达到100%时,才能生效。
提前上料许可距离LA 需要在生产中设置。该参数应从小到达慢慢增加,并且不能超过最大值,同时观察上料机器人和下料机器人之间的相对位置,保证前后机器人携带板料时,最小距离大于300mm。
⑵上料机器人提前启动压力机。机器人的优化参数里有一项可以调整机器人上料后往后退时与干涉点的间隔数值,从而改变启动压力机冲压的快慢。机器人上料后启动压力机冲压最快的时机在机器人放料完毕开始后退时,立即发出启动压力机信号。
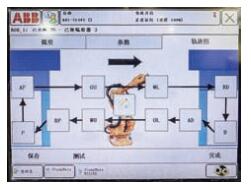
图2 机器人运动轨迹图
没有优化前,上料机器人到达退出上料点OL之后才允许压力机冲压。优化之后,上料机器人到达OL 点之前就允许压力机冲压,这段提前的距离就是提前冲压许可距离LC,界面参数为“Load Conformation Dev2 Phase1”。这个参数只能在自动模式下才能设定,并且在机器人速度达到100%时,才能生效。
提前冲压许可距离LC 需要在生产中设置。该参数应从小到大慢慢增加,并且不能超过最大值,同时观察压力机是否会出现模具保护角度报警。如果出现该报警,那么需要减小LC 值(比如减小10mm)。
另外,为了保证上模具不与机器人及端拾器干涉,需要设置压力机模具保护角度。当压力机超过该角度时,机器人及端拾器还在压力机范围内,压力机会立即制动停止。
⑶压力机提前启动下料机器人。有两个方法可以加快压力机冲压后机器人下料。一是使轨迹中的WL 点靠近压力机,二是减小压力机启动机器人下料的角度。
压力机是用电子凸轮角度信号启动机器人下料的。机器人定位精确,先将WL 点尽可能接近压力机,再减少启动角度,是比较好的做法。下料机器人到达等待下料点WU 后,等待下料授权信号,当这个信号变为1 时,机器人进入取料。没有优化前,压力机到达上死点之后才发送下料授权信号。优化之后压力机在返程途中到达下料机器人取料设定角度(该参数需要在压力机人机界面上设置),就会给机器人发送下料授权信号。
当各个单元的动作时间达到最小后,只要把生产线的五个单元协调起来,生产线就可以达到优化的理想状态了。生产线上各个单元协调生产的时候,他们的动作时间是很相近的。同时,后单元比前单元要快点,才能使生产线保持一起冲压一起搬运的同节拍,所有机器人只有一个等待点状态。假如前单元比后单元要快,生产线就不能出现一起冲压一起搬运的同节拍最优状态。机器人有两个等待点,等待下料和等待上料,CT 值下降0.2 ~0.3s。
结束语
冲压自动化生产线优化后,每天可以生产更多的冲压件;或者在产量不变的情况下提前完成当天的生产任务。为此,我们可以安排生产线一定的计划停机时间做其他事情,比如模具调试、设备日常维护等,得到的经济效益是非常可观的。

魏守利
主要从事冲压设备的管理、维护和维修工作。参与了冲压自动化生产线导入工作,冲压自动化生产线获得了中国重汽集团公司科技进步二等奖,冲压车间设备管理工作达到中国重汽集团公司设备管理 “四星级”标准。





中国重汽HOWO 轻卡2020 年产销量屡创新高,各生产线承受了巨大的生产压力。冲压自动化生产线没有成为瓶颈工序,要归功于生产节拍优化。生产节拍是衡量生产线产能的重要指标,节拍优化后的生产效率大幅提高,在相同的时间内可以生产更多的冲压件,从而降低冲压件的生产成本。